Меняющий форму робот уже не фантастика
29 Январь 2023 | Новые технологии
Исследователи создали миниатюрного робота, который может менять форму и восстанавливать её «по требованию». Эта способность позволяет ему выполнять задачи в сложных условиях или убегать/проникать за решетку (интересно, почему ученые выбрали именно такую задачу). Разработчики проверили его способность менять форму и опубликовали результаты в журнале Matter.
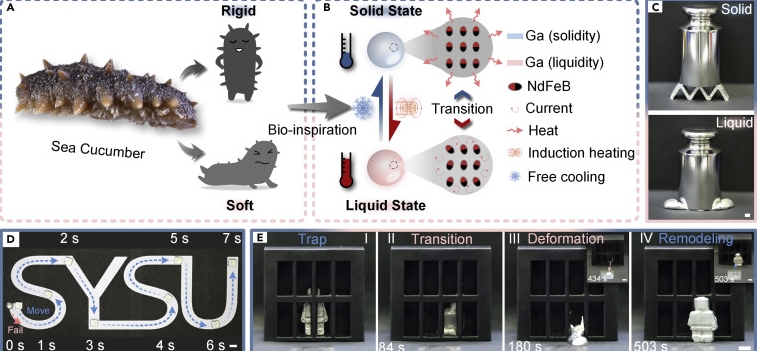
В то время как плавящийся, меняющий форму робот звучит как страшный сон Терминатора что-то из научной фантастики, на самом деле команда нашла вдохновение в обычном морском животном — морском огурце (рисунок выше). Морские огурцы “могут очень быстро и обратимо изменять свою жесткость”, — рассказывает старший разработчик и инженер-механик Кармел Маджиди из Университета Карнеги-Меллона.
Задача для нас, инженеров, состоит в том, чтобы повторить это в системах и устройствах из мягких материалов.
Традиционные роботы не всегда могут попасть и действовать в небольших пространствах. Мягкие роботы, естественно, более гибкие, но они, как правило, «слабее» и их труднее контролировать. Итак, чтобы создать материал одновременно и прочный, и гибкий, команда стала работать над веществом, которое могло бы переходить из жидкого состояния в твердое.
Чтобы достичь этого, исследователи сделали своего робота из металла под названием галлий, который имеет низкую температуру плавления около 86 градусов по Фаренгейту (30 °C), и включили в него магнитные частицы. Благодаря этим частицам ученые могут управлять роботами с помощью магнитов, заставляя их двигаться, плавиться или растягиваться.
Магнитные частицы также заставляют роботов реагировать на переменное магнитное поле. Оно производит электричество внутри металла, повышая его температуру. Используя это магнитное поле, “вы можете с помощью индукции нагревать материал и вызывать изменения”, — говорится в заявлении Маджиди. Затем охлаждение окружающей среды приводит к тому, что материал снова затвердевает. Исследовательская группа называет свое изобретение “магнитоактивной машиной для перехода твердой фазы в жидкую”.
В ходе серии тестов меняющий форму робот смог прыгать на расстояние в 20 раз длиннее своего тела, лазать по стенам и сбегать из макета тюрьмы. Согласно результатам исследования, он может держать объект весом примерно в 30 раз превышающий его собственный вес в твердом состоянии.
Исследователи говорят, что эта технология может найти применение в биомедицине. Чтобы показать, как это делается, они использовали робота для извлечения шарика из модельного человеческого желудка. Новый робот смог быстро переместиться к шару, расплавиться, окружить шар, снова объединиться в твердое тело и выйти с объектом из модели. В этом тесте исследователи использовали галлий, однако настоящий человеческий желудок имеет температуру около 100 градусов по Фаренгейту, что выше точки плавления металла. Авторы пишут, что в материал можно было бы добавить больше металлов, чтобы изменить его температуру плавления.
Но основной сферой применения разработчики считают ремонт и восстановление схем и небольших устройств. Эти роботы могли бы помогать собирать и ремонтировать труднодоступные схемы или действовать как универсальный винт, сначала расплавляясь в гнезде, а потом просто затвердевая в нем.
Это исследование было поддержано Национальным фондом естественных наук Китая, Фондом естественных наук провинции Гуандун, Специальным фондом поддержки талантов провинции Гуандун. Интерес со стороны китайских товарищей говорит о перспективности разработки.
Хорошие новости по теме: Разработана роботизированная таблетка
Источники:
https://www.newscientist.com/article/2356076-metal-robot-can-melt-its-way-out-of-tight-spaces-to-escape/
https://www.eurekalert.org/news-releases/977155
https://www.cell.com/matter/fulltext/S2590-2385(22)00693-2?_returnURL=https%3A%2F%2Flinkinghub.elsevier.com%2Fretrieve%2Fpii%2FS2590238522006932%3Fshowall%3Dtrue
https://www.sciencealert.com/scientists-create-shapeshifting-humanoid-robot-that-can-liquefy-and-reform
8
ТЕМАТИКИ
- Без рубрики
- Бизнес
- Бизнес идеи
- Досуг, туризм, отдых
- Экология
- Экономика
- Экономика и финансы
- Электротранспорт
- Факты
- Хорошие новости России
- Хорошие новости в мире
- Хорошие советы
- Интересно
- Интернет бизнес
- История
- Коронавирус
- Культура
- Культура и шоу-бизнес
- Наука
- Недвижимость
- Новости
- Новости авто
- Новости Bitcoin
- Новости экономика
- Новости культуры
- Новости мира
- Новости науки
- Новости общества
- Новости партнеров
- Новости политики
- Новости происшествия
- Новости спорта
- Новые технологии
- Политика
- Позитивное видео
- Позитивные истории
- Позитивные медиа
- Пресс-релизы
- Про игры
- Про коронавирус
- Производство
- Просто хорошие новости
- Руководство
- События и мероприятия
- Статьи
- Строительство и ремонт
- Технологии
- Товары и услуги
- Транспорт
- В мире
- Важное
- Юмор
- Забавные новости
- Здоровье и медицина
- Зелёная экономика
- Животные
СВЕЖИЕ ПУБЛИКАЦИИ
- Microsoft 50 лет
- Лазерные аппараты для карбонового пилинга в 2025: что нового?
- Марафон мультфильмов по сказкам Андерсена пройдет в Музее кино на ВДНХ
- Новый мозговой имплант поможет в общении
- Статую похищенного Паддингтона вернули на место
- Минск и Москва: культурный обмен в Книжном Поезде
- В «Маленьком театре» стартует программа для юных актёров с показом спектакля
- Какой будет уровень конкурентоспособности электродвигателей в 2025, по экспертам iPrivod?
- Стоимость металлической противопожарной двери: что нужно знать?
- В сервисе «Мосбилет» стали доступны личные рекомендации по событиям в Москве
- Продажа оригинальной техники Apple и не только: как выбрать лучшее
- Онлайн форум социальной инженерии: откройте для себя мир манипуляций
- Бухгалтерское обслуживание: список услуг для бизнеса